9月15日22點04分,天宮二號在酒泉發射中心成功起飛。約10分鐘后,天宮二號脫離火箭,以昂揚的姿態飛向預定軌道。這一刻,任務的接力棒正式傳遞到北京航天飛控中心。北京飛控中心,被認為是我國載人航天工程和深空探測工程的“神經中樞”。此刻,它再次成為全世界關注的焦點。
任務測控通信指揮部指揮長、北京飛控中心副主任李劍在接受科技日報采訪時表示:“與之前的交會對接任務不同,這次任務面臨著周期更長、在軌試驗更多、技術要求更高的形勢特點。”
最難:百余套方案應對飛控潛在風險
根據本次天宮二號與神舟十一號載人飛行任務要求,航天員將在軌飛行長達33天。33天,對普通人來說,只是我國載人飛行史上一個新紀錄的誕生,但對飛控中心來說是一個充滿難度的新挑戰。
李劍告訴記者,33天意味著地面飛控人員長時間值守,飛控軟硬件系統高強度不間斷工作,地面測控網全時段連續跟蹤。這對測控系統的穩定性和可靠性,以及各類應急情況下系統綜合保障能力提出了更高要求;飛船太陽帆板任意偏置角跟蹤太陽功能驗證、人機協同在軌維修、伴星釋放及飛越探測等嶄新的在軌試驗對軌道控制精度、系統間協同配合、地面監視判斷要求都很高。
這些都是飛控中心面臨的潛在風險。
在今天下午的飛控中心發布會上,李劍信心滿滿,他說,挑戰雖大,風險雖多,但北京飛控中心從完善方案預案到關鍵技術攻關,從組織聯調演練到強化崗位訓練,均已做好萬全準備。
據介紹,為確保任務萬無一失,李劍和他的同事們先后完成100多套的飛控實施方案并順利通過專家評審,攻克5項關鍵飛控技術難題。
最新:關鍵飛控技術面臨的5大全新挑戰
實際上,被李劍反復提及的5項關鍵飛控技術是整個團隊在本次任務中面臨的全新挑戰。
“首要面臨的困難就是中長期定軌預報精度要求高”,李劍表示,天宮二號交會對接軌道比天宮一號高出幾十公里,需要在飛船發射前20余天實施軌道維持,同時兼顧調相、圓化和軌道高度控制,對長時間軌道預報精度提出了新的要求。
另一方面,為適應空間站交會對接任務目標飛行器不進行調相的控制需求,神舟十一號飛船需具備在初始相位差、入軌遠地點高度的一定范圍內進行交會對接的能力。北京飛控中心需重新設計遠導控制策略,應急控制策略也進行了相應調整。
“短弧段快速測定軌”是一個聽起來有點晦澀的詞匯,卻也是飛控中心不得不面臨的問題。同時,為驗證飛船快速軌道控制能力,飛船返回前的軌道維持采用一圈內兩次變軌的控制模式。“這對返回前快速軌道控制技術提出了新的挑戰”,李劍強調。
“伴星飛越觀測及駐留軌道控制”是另一項不能不提到的關鍵飛控技術。在組合體運行階段,飛控中心要控制伴星實現飛越觀測組合體等試驗;同時還要實現駐留點捕獲、駐留點保持、駐留點轉移等復雜類型控制,駐留及飛越軌道精度要求高。
令人欣慰的是,這些挑戰被逐一克服。“我們梳理制定800多個各類故障預案,升級改造20余個飛控軟件系統,調整完善10項硬件系統,組織了近200次聯調演練”,李劍說。
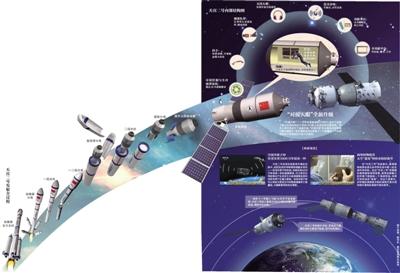
最美:三維可視化技術讓飛天畫卷鋪陳眼前
天宮二號遨游太空,它的一舉一動都可以在你的眼前逼真展示;神舟十一號約會天宮,它的一顰一笑都可以在你眼前完美呈現。
是誰有如此神奇的魔力,將美麗的飛天畫卷鋪陳眼前?答案就隱藏在北京飛控中心的一個小小機房。
在這個被稱作“終端三機房”的地方,飛控中心軟件工程師范文山打開一個被稱作“航天任務可視化引擎”的軟件系統,這套系統的核心正是中心具有自主知識產權的三維可視化技術。
“我們的三維可視化技術對深空背景的模擬是按照真實星歷和天體運動模型;對地形信息的模擬是采用真實的遙感衛星影像資料,并考慮邊緣大氣模型;任務中對航天器的仿真是基于實時數據驅動和海量數據實時管理的,而且實現了基于GPU并行環境的真實感光照算法,大幅度提升了三維仿真畫面的品質。”范文山解釋說。
讓范文山引以為豪的還遠不止這些。據了解,在這項技術的研發過程中,范文山和他的同伴們在支持多任務多目標的同時,突破了基于操作系統平臺的限制,從而適應了航天系統軟硬件國產化建設需要。
自主研發、國產化一直是范文山和他的同事們追求的目標和努力的方向。依托第三方開發或購買國外軟件,不但費用高,而且在操作性、安全性、可靠性上都存在隱患。
“受外方軟件功能限制、專業對接不暢等因素影響,以前準備一項航天任務的三維顯示大概需要一年左右時間。現在,我們有了自主研發的支持多任務、多目標三維可視化技術,準備任務的周期縮短到幾周時間”,范文山告訴記者。
